Designing a robot models in Fusion to URDF for simulations.
Picture this: You've just finished designing the perfect robotic arm in Autodesk Fusion 360. Every joint is precisely engineered, every component carefully considered. But what if you could see it move, test its limitations, and simulate its behavior in a physics-based environment before building it in the real world? Enter the magical world of URDF (Unified Robot Description Format) and Gazebo simulation.
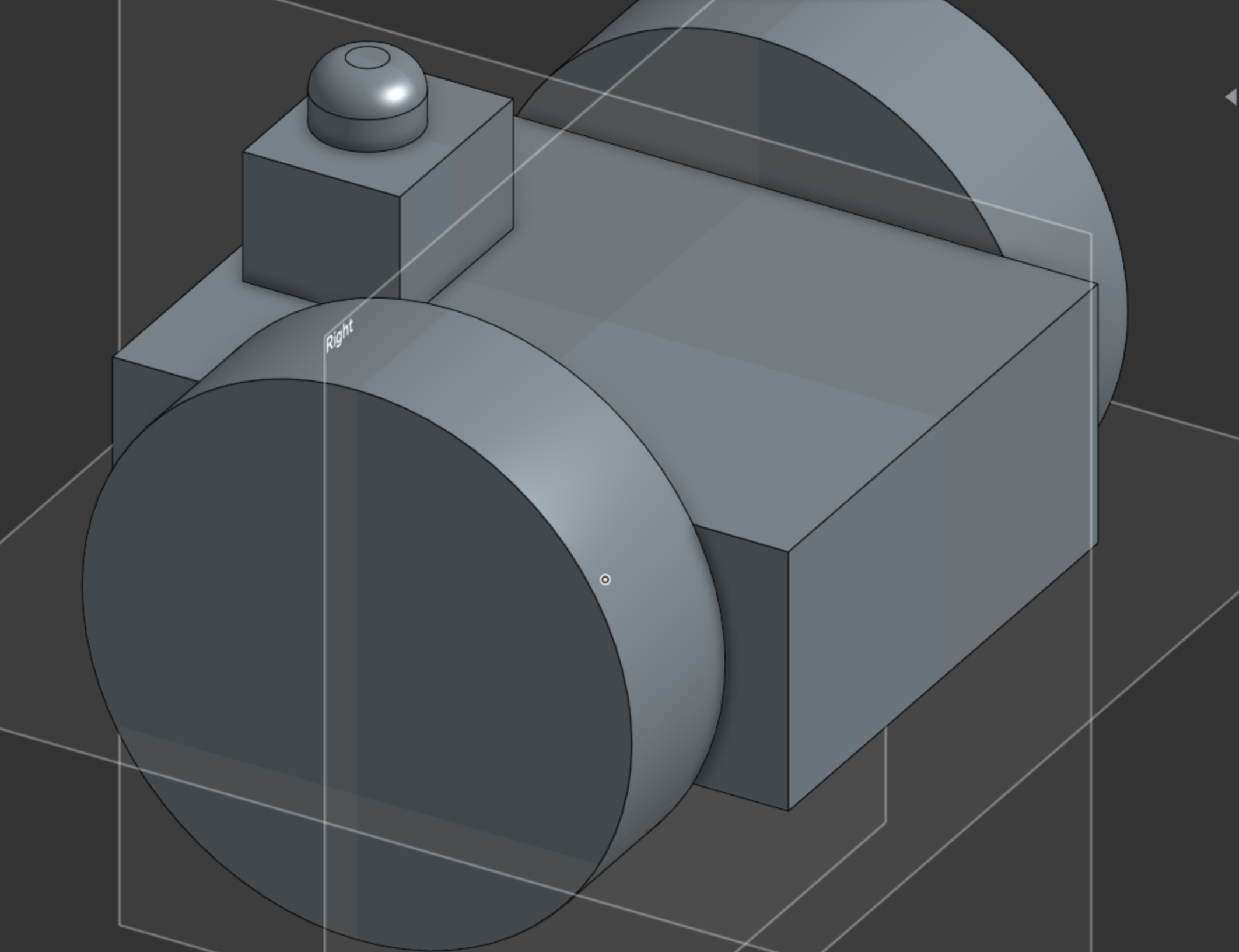
Interactive model showing the key components of our example robot
Why This Matters
Transforming your static CAD models into dynamic, simulatable robots isn't just a technical exercise—it's like giving your creation a spark of life. By converting Fusion 360 models to URDF format for Gazebo, you're building a bridge between the precision of CAD design and the dynamic world of robotics simulation.
Visual Guide to Our Process
Robot Creation Process Summary
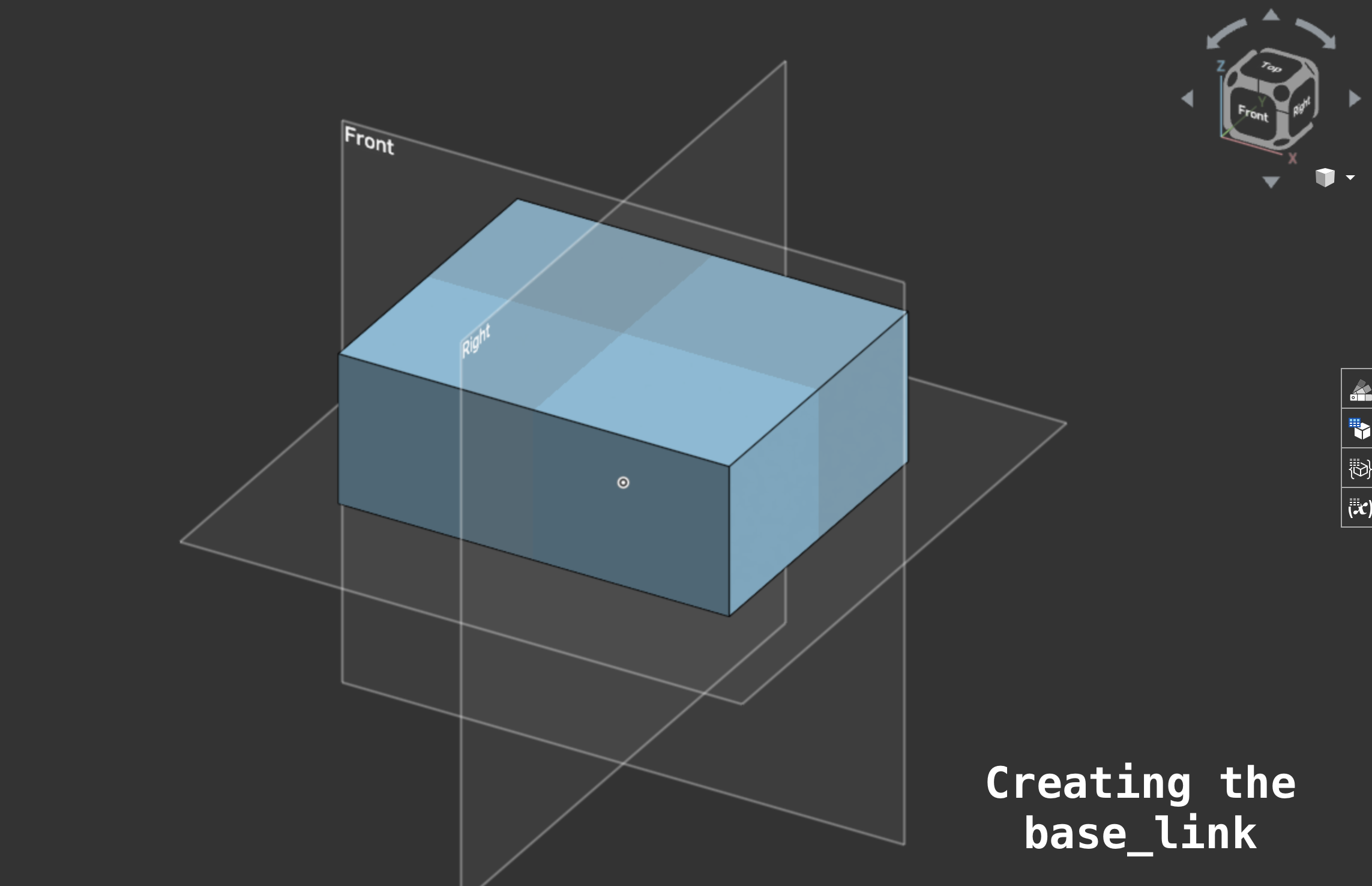
CAD Design Design the robot in Fusion 360, ensuring the orientation is set up correctly (x-axis forward, y-axis to the side, and z-axis up) so the robot moves as expected. The design process involves:
- Creating a base for the robot (e.g., a square).
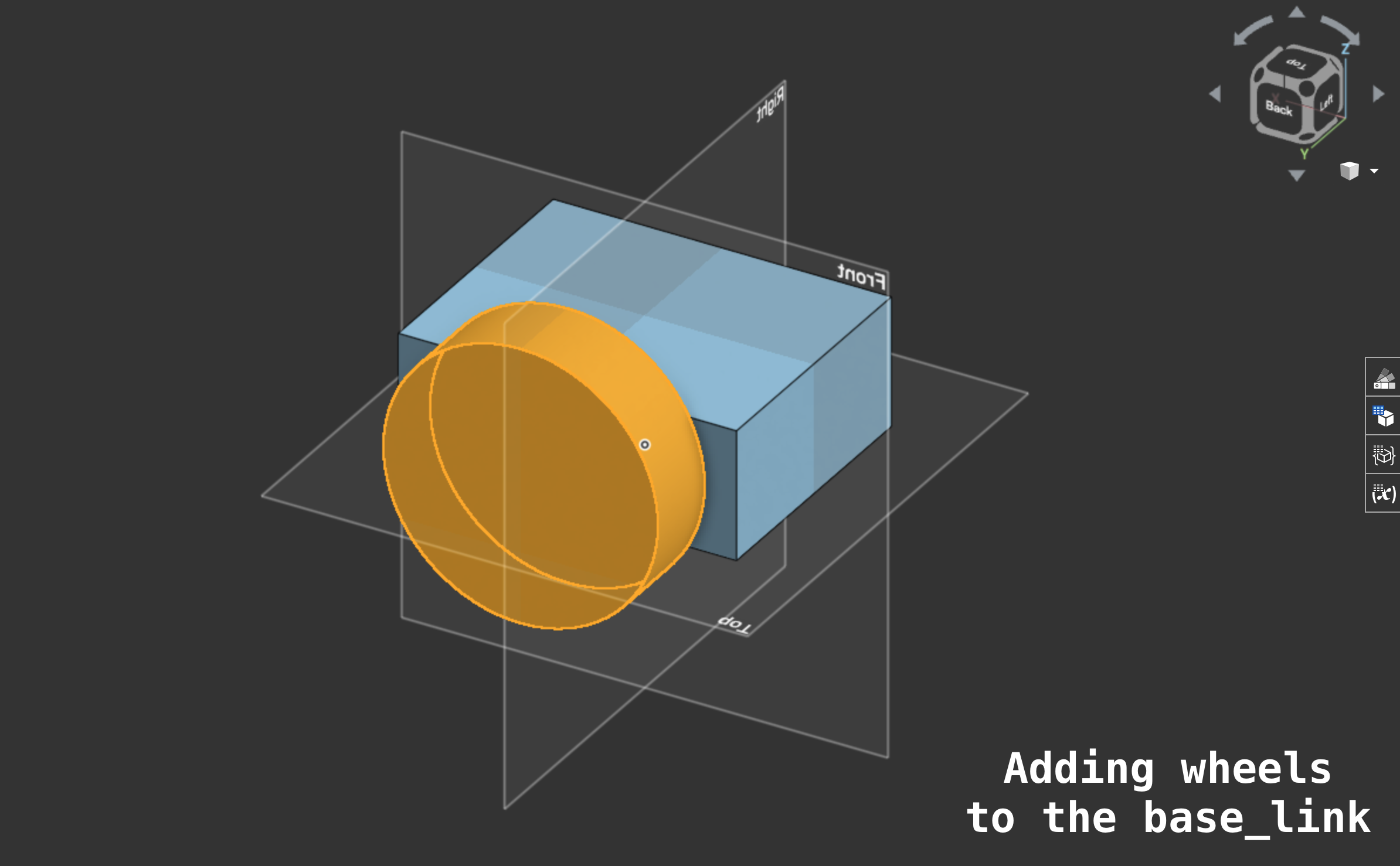
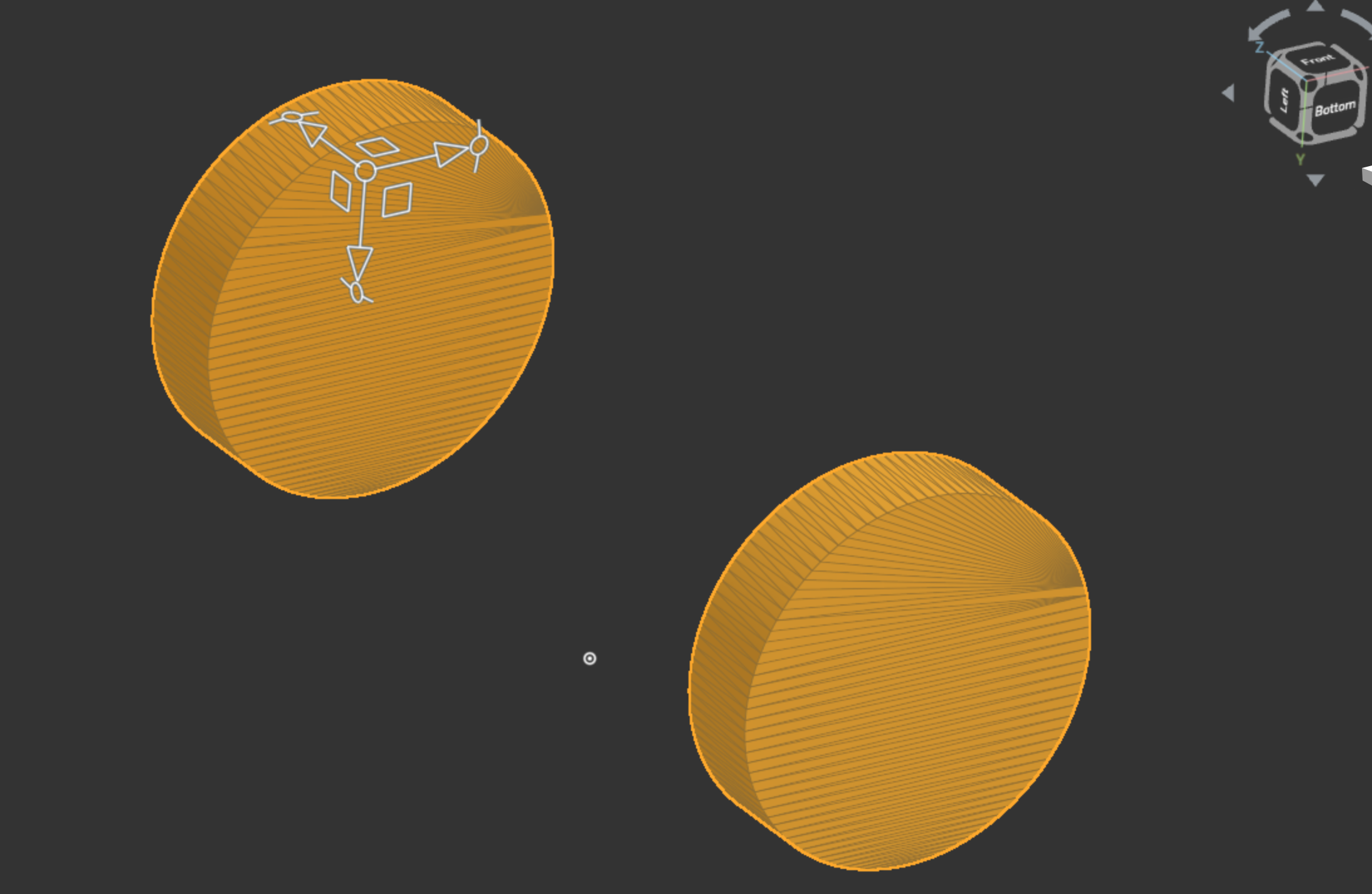
- Designing and positioning the wheels.
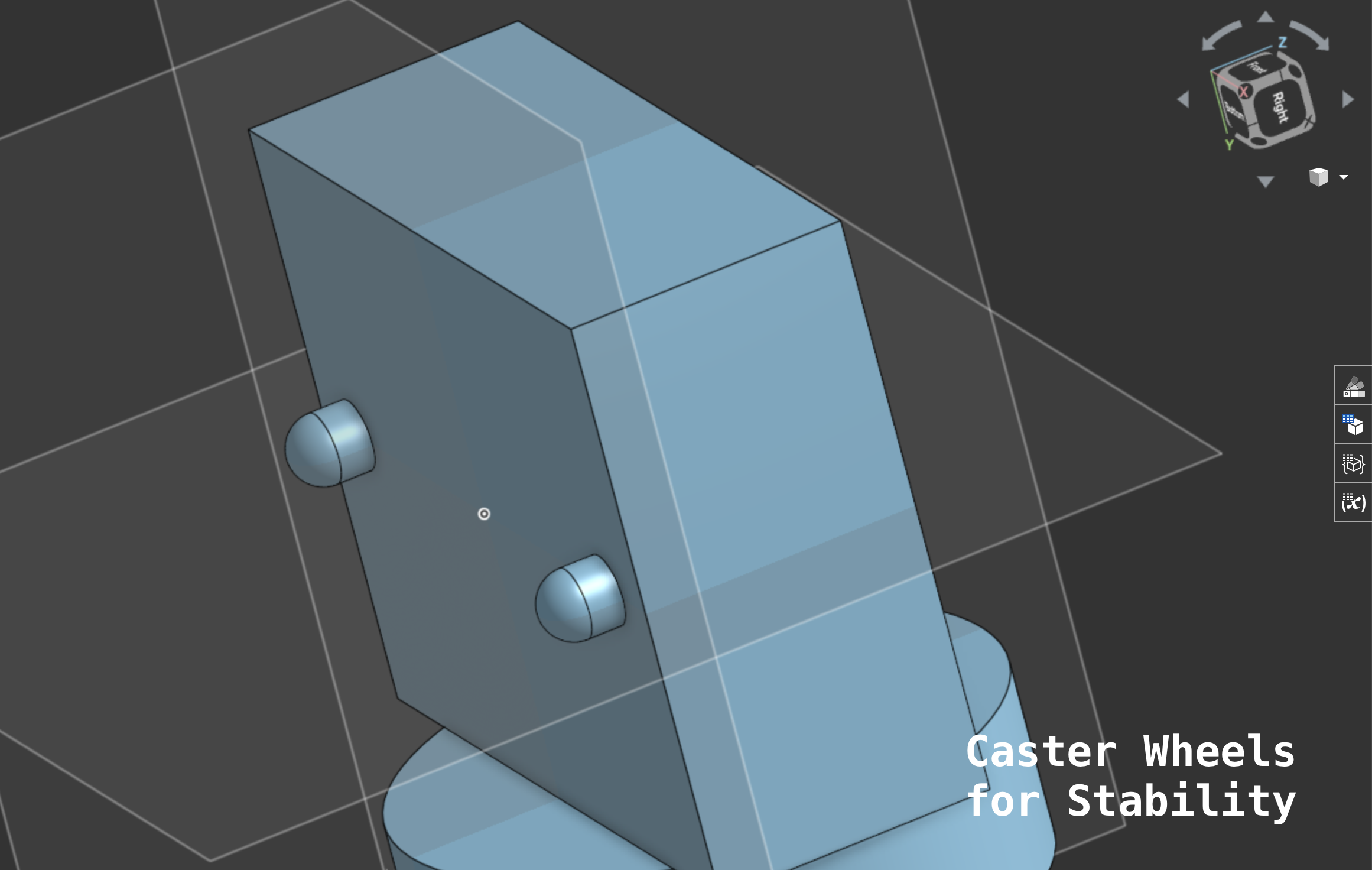
- Adding caster wheels to prevent the robot from falling.
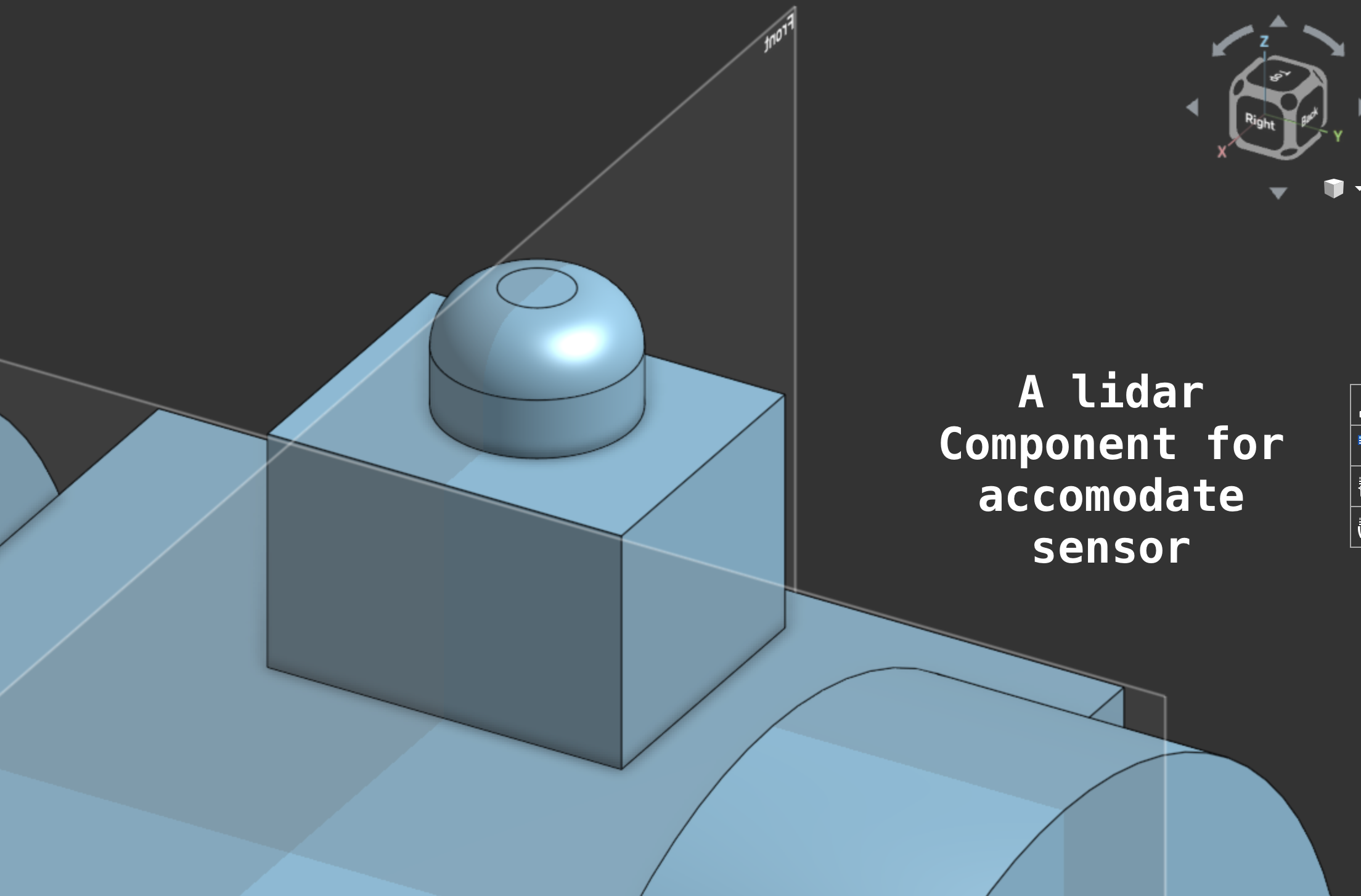
- Incorporating sensors like a LIDAR unit.
Export Preparation
To prepare your model for export, start by organizing and naming each component in Fusion 360 according to its intended function. For instance, you could label the main body as base_link, while individual parts like the wheels and lidar sensor could be labeled right_wheel, left_wheel, and lidar. Proper naming is crucial as it allows for easy reference in the URDF structure, making it more straightforward to define interactions and movement later on.
Next, assign realistic materials to each part. Using ABS plastic or a similar material for the body mimics the rigidity and appearance typical of plastic components, while assigning rubber to the wheels gives them realistic friction properties. These materials not only give your model a realistic look but also affect physical behavior in simulations, contributing to more accurate results. Once the materials are set, convert your parts into components in Fusion 360. Structuring the model into components enables each part to be transformed and joined individually, which is essential when defining the robot's movement and interactions.
Defining joints is the next step. For wheels, use revolute joints, allowing them to rotate around a fixed axis. This is critical for simulating wheel motion and enabling the robot to move. For components like the lidar, a rigid joint is appropriate since it should remain fixed relative to the body. Make sure the joints are oriented correctly, as this directly influences the realism and accuracy of your simulation in Gazebo.
URDF Conversion
With the model organized, you can now convert it into a URDF file. Fusion 360 offers a URDF exporter plugin that handles this process, converting your model into the URDF format and generating a package containing all necessary files.
fusion2urdf Exporter to export your designs to urdf.
Read More HereThese include the URDF file itself, which defines the robot's structure, along with launch files to load the model in Gazebo and mesh files in STL or COLLADA format, which Gazebo will use to render the robot. After the export, it's good practice to check the URDF for any errors or missing tags, as minor adjustments may be needed to ensure compatibility with ROS and Gazebo.
Final Thoughts and Future References
By following these steps, you've successfully transformed your Fusion 360 model into a URDF format, setting the foundation for seamless integration with ROS. This conversion process—from organizing components, assigning materials, and defining joints, to exporting with the Fusion 360 URDF plugin—empowers you to bring complex CAD models into a virtual environment where they can be interacted with programmatically.
Whether you're designing for simulations, testing robotic kinematics, or preparing a model for more advanced control setups, having your Fusion 360 model in URDF format is a powerful step forward. With your model now in ROS-compatible format, you're well-prepared to continue exploring robotics, experimenting with new configurations, or integrating additional sensors and mechanisms. This process not only enhances your model's realism but also provides a bridge from design to functional simulation and beyond.
You can follow the suggestion below to see how I setup gazebo to simulate the robot moving around.
Simulations with Gazebo
Read More HereHere are also a list of resources used to design the robot and export to URDF.